1. PCとPICkit2とポイントコントローラー(N1509A)を接続
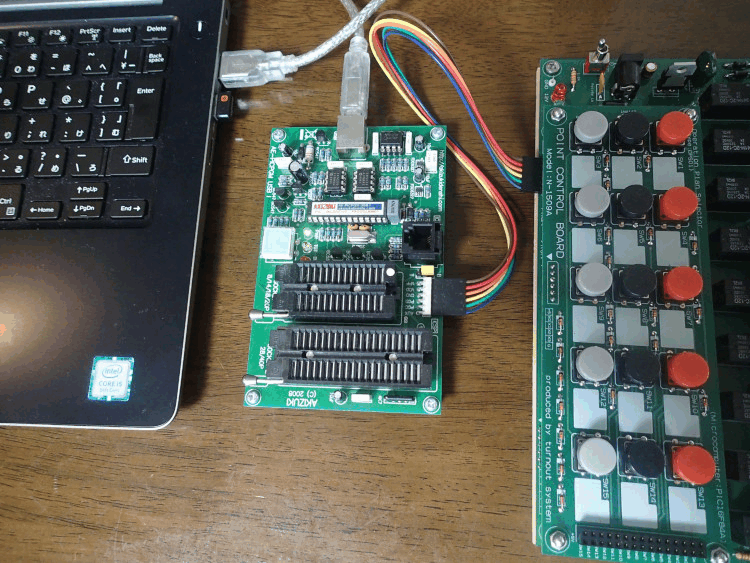
「AKI-PIC2プログラマボード(PICkit2互換)」は販売中止となっています。 従ってPICkit4又はPICkit3(正規品又は互換品)にて書き込んでください
PICkit2をてPICkit4又はPICkit3(正規品又は互換品)に読み替えてください。
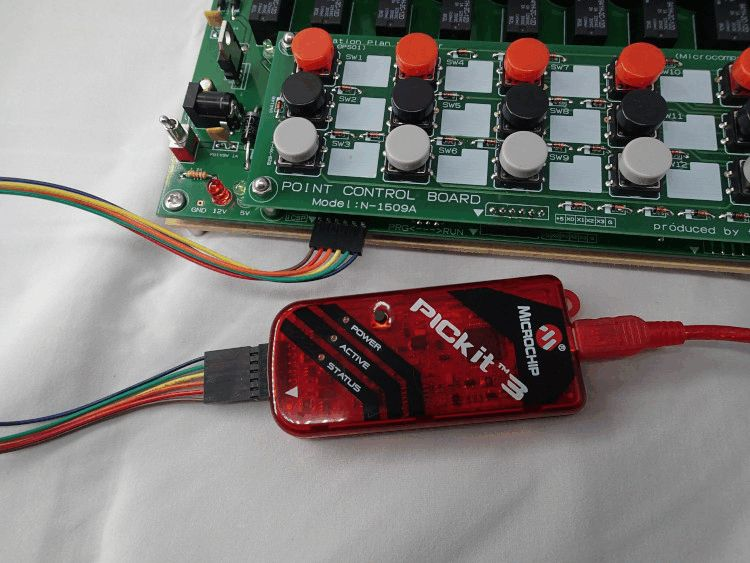
2. PICkit2とポイントコントローラー(N1509A)を接続
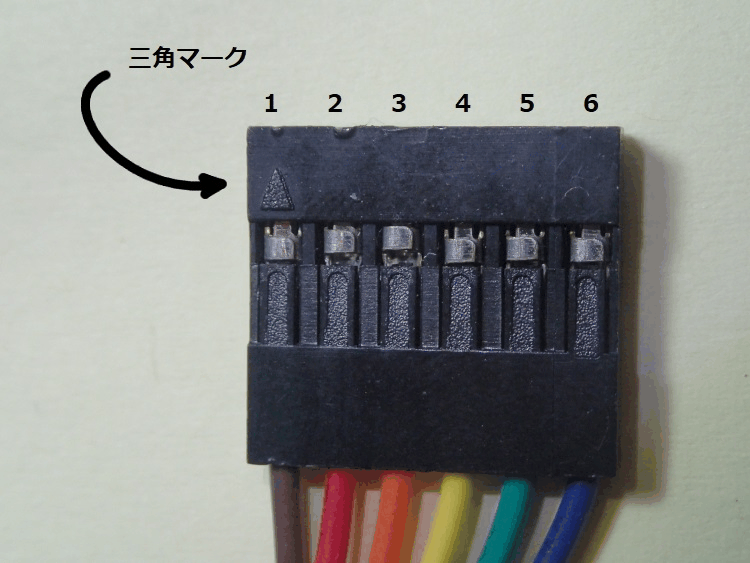
QIコネクタ6Pの接続は「三角マーク」を確認する必要があります。
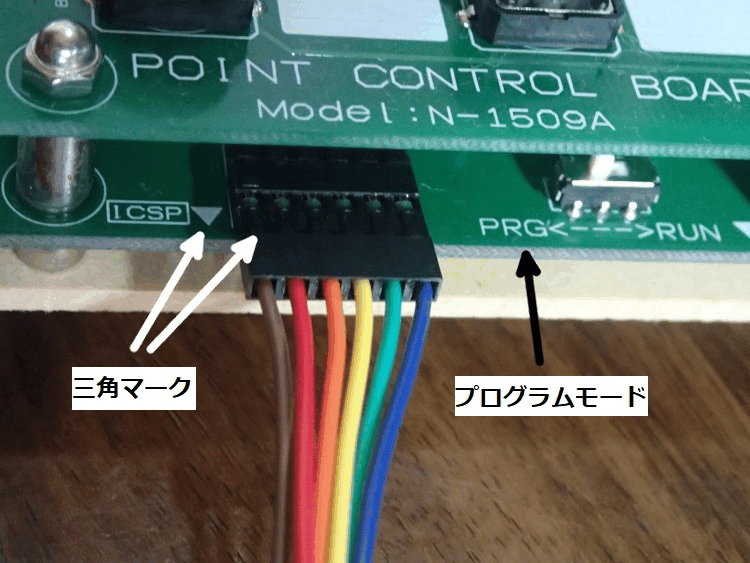
3. QIコネクタ6Pとポイントコントローラーとの接続
ポイントコントローラー(N1509A)のICSP接続コネクタの「三角マーク」とQIコネクタ6Pの「三角マーク」を合わせて接続する。
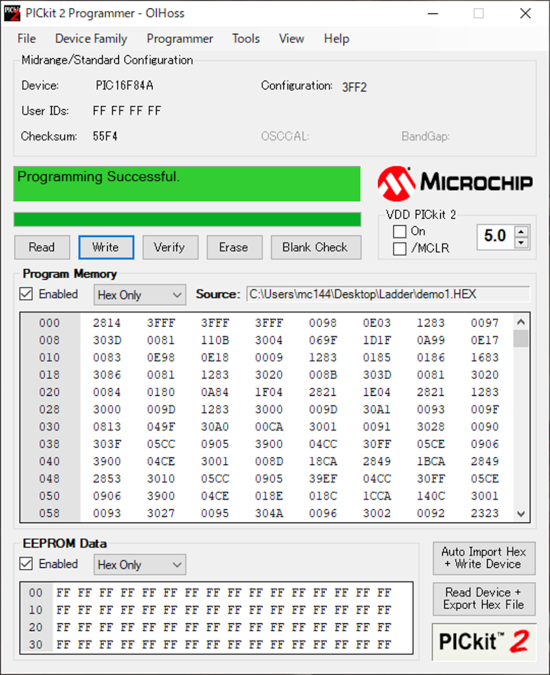
その際にスライドスイッチをログラムモードプに変更しておく。
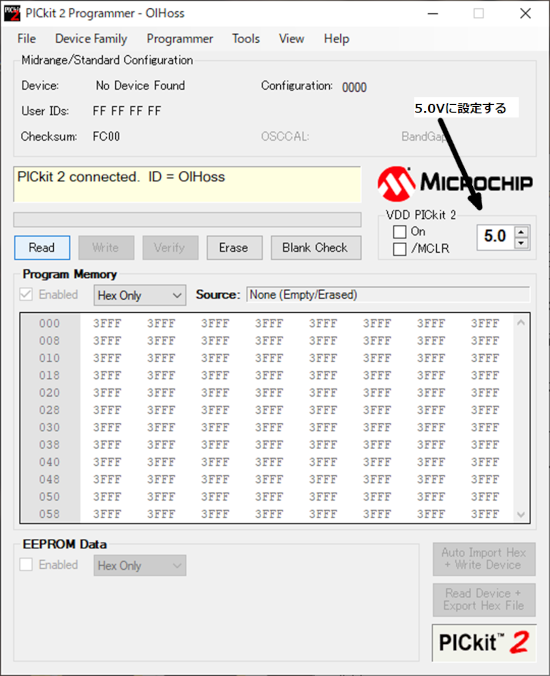
書き込み電源はPICkit2から供給しますのでポイントコントローラーの電源はオフにしておきます。
電源オンでも書き込みは可能ですが、書き込み終了と同時に中途半端に動作が開始しますので、
電源オフで書き込みを行うことを原則としてください。
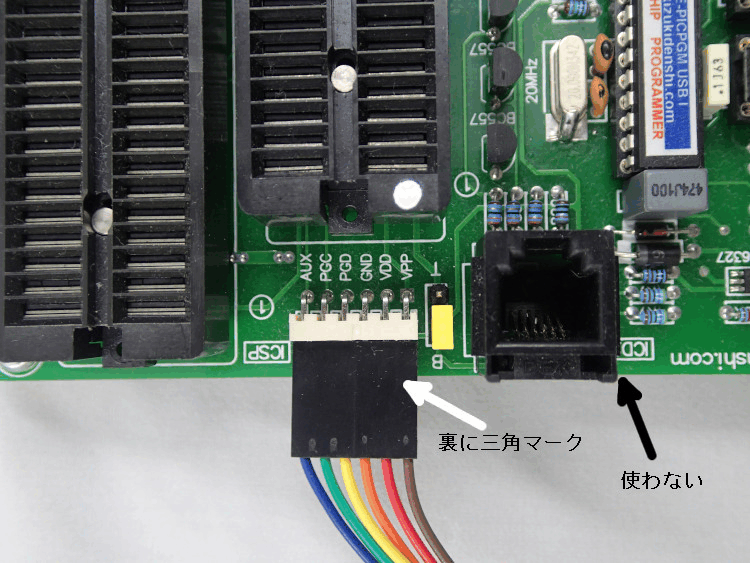
4. AKI-PIC2プログラマボード(PICkit2互換)の接続
QIコネクタ6Pの接続は「三角マーク」は下向きになり上からは見えません。
当然のことですが、コネクタの接続を間違えると正常な動作をしないばかりか、電機部品を破損させますから注意が必要です。
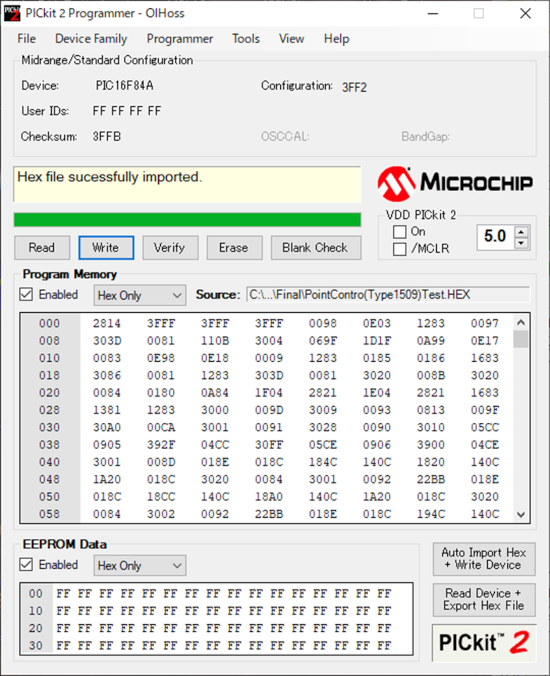
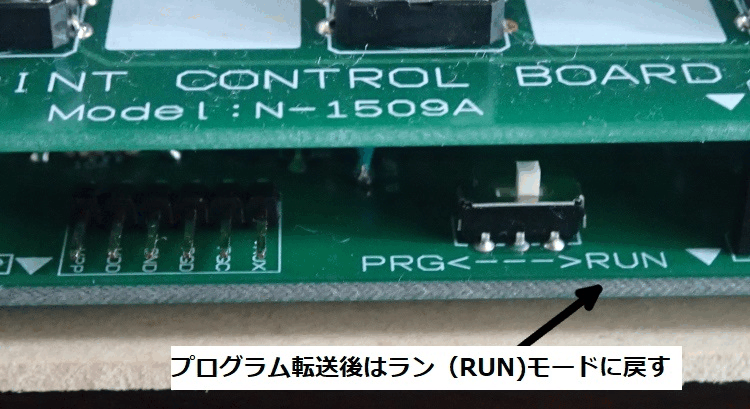
5. プログラム転送後はスライドスイッチをランモードに戻す
プログラムの転送が終わったらQIコネクタ6Pを外します。
同時にスライドスイッチをランモードに戻します。
切り替えるのを忘れてプログラムモードのままにして置くとP8とP9が出力されません。
動作がプログラム通りにならないので忘れずにラン(Run)モードに戻してください。
デバッグのためQIコネクタ6Pをつないたままでも、スライドスイッチをラン(Run)モードに切り替えれば、動作に問題はありません。
PICkit3の場合はQIコネクタ6Pを切り離さないと動作しないので注意が必要です。
|